
有沒有發現有關“汽車智駕”的討論方向愈發偏題?
曾經的討論方向主要集中于傳感器類型和優缺點,芯片算力和算法,以及不同硬件平臺方案;而現在的討論方向主要集中于“誰更強”或者“系統名稱。”智能輔助駕駛或組合輔助駕駛的名稱鮮有人去提,簡稱的“智駕”或“NCA”成為分析解讀最常用的名詞。
有多少汽車愛好者知道NCA是哪三個單詞的縮寫,又是什么意思?
筆者的英文水平相當一般但在解讀類似話題的時候也知道必須先搞清楚縮寫的含義,否則很有可能對讀者產生誤導——navigation、導航,cruise、巡航,assist、輔助——Navigation Cruise Assist,縮寫為NCA,準確的翻譯應當是“導航巡航輔助。”

NCA局限性解讀
NAC的意思就是這樣,可是筆者看到最多的分析評論均以“高速領航(NCA)”或“城市領航NCA”為主。怎樣領航?誰來領航?領什么航?根本沒有領航,無非是可以在高速公路或城市道路使用的導航巡航輔助功能罷了。但是關于NCA的解讀才剛剛開始,因為在相關的偽技術話題里大都只講系統可以實現的功能或覆蓋的場景,對于系統或功能使用局限性的講解普遍不夠全面。
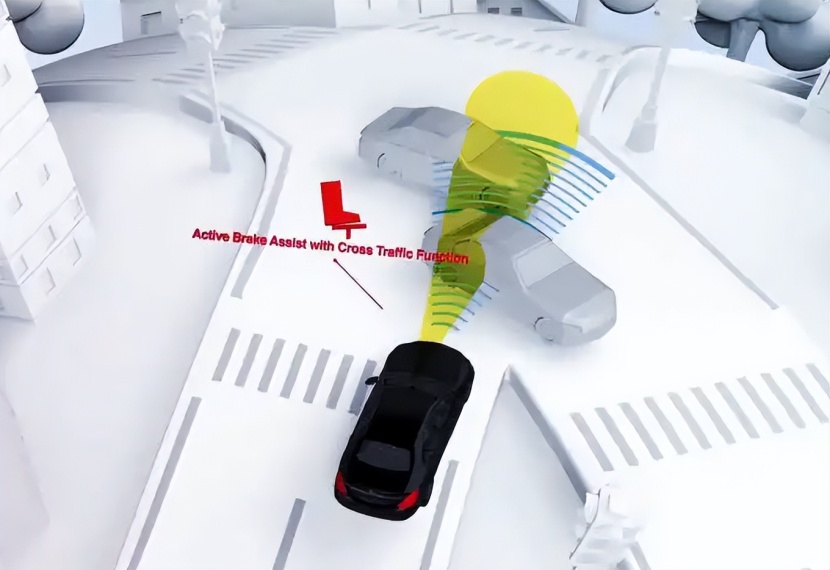
下面就以某車輛對NCA局限性的說明為參考,看一看“導航巡航輔助”不宜用于的場景都有哪些吧。
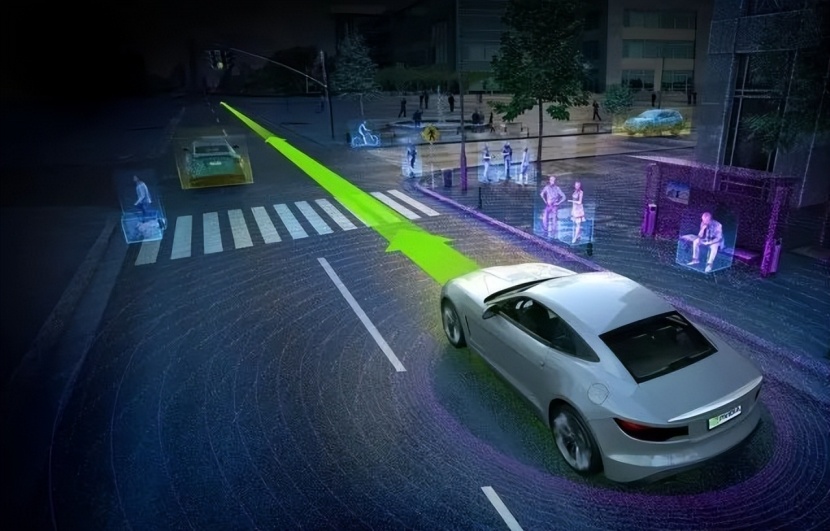
包括但不僅限于:夜晚,雨雪霧、揚塵、濃煙、暗光、逆光、炫光、無路燈等場景車道線模糊(磨損導致)車道線混亂(如道路施工臨時調整)無車道線、道路劃線不清晰、新舊車道線或標識重疊車道線迅速變化(如分叉、橫穿或合并)擁堵路口人、車在路口隨意穿行有行人、動物或非機動車忽然從視覺盲區中闖入前車急剎遇到異型車(車外懸掛物、靜止或低速行駛的工程車)
等等。
在這些場景中,NAC作為“輔助駕駛功能”可能會無法起作用或者自動退出系統——有多少正在使用NAC功能的司機真正了解這些不可用或不宜用的場景局限性呢?想來不會有很多。作為普通汽車用戶不會去深度研究系統的特性,哪些場景能用,哪些場景不能用,參考的主要是技術發布會上激昂慷慨的講解和門店銷售人員的夸夸其談;真正了解到這些知識點的時候,往往是錯誤使用NAC而造成交通事故并想要廠家負責的時候,但是門也沒有啊——人家或在用戶手冊或通過其他方法明確說明過了,錯誤使用只是因為車主沒有仔細去閱讀理解而已。
為何在上述場景中不宜使用NAC呢?
在低能見度交通氣象條件中或者路面濕滑的條件下,別說是“導航巡航輔助”系統不宜使用,就算是最為基礎的“定速巡航”也是不能使用的。因為系統很容易出現錯誤判斷,攝像頭傳感器的進光量是有限的,只要面對攝像頭出現強光源,攝像頭的“進光通道”就會被堵滿——障礙物反射出的光線無法進入攝像頭,所以攝像頭在強逆光、炫光等場景中幾乎發揮不了作用。
毫米波雷達也有局限性,雖然其對于低能見度場景具有良好的適應性,但是諸如雨雪等現象還是會降低其性能。
激光雷達可以三維立體識別障礙物,但是這種傳感器在低能見度天氣中很難發揮作用。

此時就需要以“模糊的數據”進行邏輯分析,然而對于“組合輔助駕駛”的二級系統而言,這同樣是很難做到的。至于在城市道路中則更難做到,行人、非機動車和機動車共用的道路和動態的交替會產生超量的數據,系統算力是否能勝任看來不難分析,系統算法能否解決三類交通元素長久以來的矛盾更不難解讀,其中涉及到倫理道德的相應難題,這是機器無法理解和解決的。

現在如果依然認為“智駕”是“真智能駕駛”且“NCA”是“真智能領航”的話,那筆者也無可奈何了,但是只作為汽車司機要了解一點:
NAC有明確定義,組合輔助駕駛二級系統也有明確定義;作為司機不了解系統的真實功能和局限性則是司機自身的問題,如果因錯誤理解而錯誤使用相應系統引發交通事故,后果是需要由其自行承擔的。且如果因上述因素引發交通事故并造成其余人員傷亡或公私財產較大損失,屆時司機還有可能要承擔相應的刑事責任。
截止目前為止尚無“真智能·自動駕駛汽車。”
記住這一點是沒有錯的,明日起將會有個別城市認可自動駕駛私家車的合法性;所以4月1日是真正自動駕駛的開端,從這一天起可以開始關注車企的動態,看一看有沒有車企敢于推出達到L3級系統的私家車吧。

















 粵公網安備 44010602000157號
粵公網安備 44010602000157號
